Les liens des balises <link> et <wagolink>
<link> ou <wagolink> ?
L'action de l'utilisateur sur un bouton sur un slider ou sur un switch, est traduite par un appel réseau à définir dans la balise
<link> ou <wagolink>
A noter que la balise <wagolink> est prioritaire sur <link> s'ils sont tout deux présent.
Un seul lien de ce type est donc nécessaire, la différence est dans le mode de passage des paramètres, GET pour <link> et POST pour <wagolink>.
- Le lien n'est pas nécessairement pointé sur l'automate, une autre machine réalisant l'action est possible.
- L'application Wagolink n'attends pas la réponse sur cet appel, que l'action soit faite est important, le résultat : lampe allumée par exemple sera probablement marqué dans une autre balise lors de la prochaine relecture du fichier WagoML, le bouton, le slider seront également mis à jour.
GET avec <link>
Ce lien est appelé à la suite d'une action, le bouton par exemple, il permet d'informer un serveur que l'action est à faire.
La syntaxe est libre puisque l'automate ne peut être appelé directement par ce type de lien. Ce dernier à besoin d'un appel en mode POST.
On en réservera l'usage pour un lien vers un serveur ou un dispositif simple comme le contrôleur MBED qui exploite des liens de type RPC en mode GET.
Exemple :
<link>http://serveur_IP/dossier/lampe.php?x=1</link> : sur un bouton "ALLUMER"
<link>http://serveur_IP/dossier/lampe.php?x=%d</link> :
- sur un switch "%d" est remplacé ici par la valeur demandée du switch : 1 ou 0
- sur un slider "%d" sera remplacé par la valeur numérique entière de la position avec calcul inverse.
Le remplacement porte sur le premier élément rencontré dans le lien, ce qui permet de passer un %d comme argument si besoin.
Un lien de type RPC
<link>http://serveur_IP/rpc/variable/write+1</link>
- ce type est exploitable sur les microcontrôleurs MBED par exemple. "+" représente pour un URL le blanc (espace), dans ce type de lien
les paramètres sont séparés par un espace, on ne trouve pas le "?" séparateur.
POST avec <wagolink>
C'est le mode utile pour l'automate WAGO qui exploite une action - placer une variable - par des formulaires, Il est donc nécessaire de
passer les paramètres sur une méthode POST. Sans détailler le principe ici, ce mode est aussi exploitable vers un appel pour un serveur
standard.
Il sera préférable d'utiliser cette méthode car elle est utilisable dans toutes les situations.
Le syntaxe pour le monde WAGO est donc plus rigide sur cette expression du lien.
Le but est de répondre à un pseudo formulaire envoyé par l'automate, les variables sont fixes donc.
On trouve en exemple :
- <wagolink>http://IP_atomate/WRITEPI?ADR1=MW0&VALUE1=%d&FORMAT1=%d</wagolink>
Cette action simule la réponse envoyée par l'automate comme formulaire, ce dernier accepte donc de modifier la variable "MW0" et prendre la valeur
en "VALUE1=" le %d est à cette occasion remplacé par la valeur du slider ou du bouton.
NOTE : Uniquement dans les balises <link> et <wagolink> le signe & doit s'écrire &
Les remplacements dans l'url par Wagolink
Wagolink remplace certaines balises dans les liens par les valeurs mesurées avant l'envoi effectif, le déclencheur est le signe % suivi d'une lettre :
- %d : (de VALUE1=%d) est remplacé par la valeur future du bouton : 1 ou 0, ou par la valeur du slider.
- %c : est remplacé comme %f mais sans calcul inverse pour le slider, valeur directe 4 décimales.
- %f : est remplacé par la valeur en float (pour le slider), le calcul inverse est appliqué
Les sliders
Le slider est particulier, il a besoin d'une valeur minimum et maximum. Une mise à l'échelle est nécessaire pour représenter une valeur.
c'est le but du coefficient <coef> et de <offset>, l'équation lineaire (y = ax + b) est appliquée, la grandeur physique sur
l'automate est souvent un entier de 0 à 32768 qui represente une grandeur variant de 10 à 40°C par exemple, ce cas de figure est
soluble avec l'utilisation d'une équation linéaire.
Fixer les coef et l'offset permet alors une representation optimale pour un slider.
L'equation inverse s'applique si l'usager change la valeur de consigne pour retrouver une grandeur normalisée pour l'automate. Le curseur
du slider est positionné à la fois par l'utilisateur et par le process.
Cycle des calculs pour un slider :
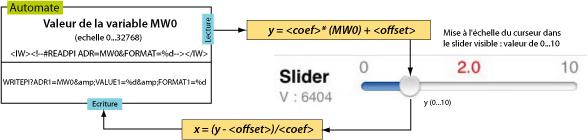
MW0 est pour l'exemple une autre variable est utilisable aussi.
-